
Hi Miguel,
you can now place the label on the bottom left of an element.
view := RTView new. view @ RTDraggableView.
shape := RTArc new innerRadius: [ :i | i *50]; externalRadius: [ :i | (i * 50) + 4];
alphaAngle: 45; betaAngle: 135; color: Color black. elems := shape elementsOn: (1 to: 10). view addAll: elems. elems @ RTHighlightable.
label := RTLabelled new text: #yourself. label bottomLeft. elems @ label.
view
On May 20, 2015, at 5:51 PM, Miguel Campusano mcampusa@dcc.uchile.cl wrote:
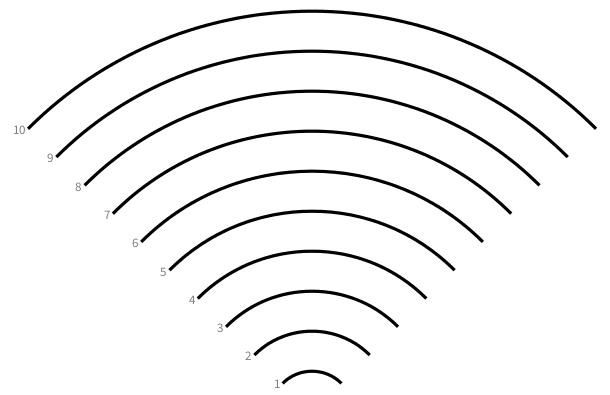
The behavior is still odd. If I change the previous code to 10 visualize ten arcs:
view := RTView new. shape := RTArc new innerRadius: [ :i | i *50]; externalRadius: [ :i | (i * 50) + 4];
alphaAngle: 45; betaAngle: 135; color: Color black.elems := shape elementsOn: (1 to: 10). view addAll: elems.
label := RTLabelled new text: #yourself. label left. elems @ label.
view
The result is this:<labels2.png>
I think this happens because it is trying to put the label at the left-center of the arc (encompassing rectangle?). There is a way to put it at the left bottom?
On Wed, May 20, 2015 at 5:37 PM Alexandre Bergel alexandre.bergel@me.com wrote: The label is put on the left of the encompassing rectangle of the arc. It is not always what one wants to achieve, as you demonstrated on your example.
Alexandre
_,.;:~^~:;._,.;:~^~:;._,.;:~^~:;._,.;:~^~:;._,.;: Alexandre Bergel http://www.bergel.eu ^~:;._,.;:~^~:;._,.;:~^~:;._,.;:~^~:;._,.;:~^~:;.
On May 20, 2015, at 4:22 PM, Chris Cunningham cunningham.cb@gmail.com wrote:
Looks somewhat odd, still, when you change the angles:
view := RTView new. shape := RTArc new innerRadius: [ :i | i *50]; externalRadius: [ :i | (i * 50) + 4]; alphaAngle: 315; betaAngle: 45; color: Color black. elems := shape elementsOn: (1 to: 2). view addAll: elems.
label := RTLabelled new text: #yourself. label left. elems @ label.
view
<image.png> If you use the angles 270 and 90 (in that order), you get: <image.png>
-cbc
On Wed, May 20, 2015 at 1:26 PM, Alexandre Bergel alexandre.bergel@me.com wrote: Thanks Milton! I was on this issue, but you were faster than me :-)
Good job! Alexandre -- _,.;:~^~:;._,.;:~^~:;._,.;:~^~:;._,.;:~^~:;._,.;: Alexandre Bergel http://www.bergel.eu ^~:;._,.;:~^~:;._,.;:~^~:;._,.;:~^~:;._,.;:~^~:;.
On May 20, 2015, at 3:18 PM, milton mamani akevalion@gmail.com wrote:
Hi
There was a problem in #encompassingRectangle in TRArcShape, try again with the last version of Roassal
<image.png>
Cheers, Milton
2015-05-20 13:51 GMT-04:00 Miguel Campusano mcampusa@dcc.uchile.cl: Following this, I tried to add labels to the arcs but It is not working as I expected. My code:
view := RTView new. shape := RTArc new innerRadius: [ :i | i *50]; externalRadius: [ :i | (i * 50) + 4]; alphaAngle: 45; betaAngle: 135; color: Color black. elems := shape elementsOn: (1 to: 2). view addAll: elems.
label := RTLabelled new text: #yourself. label left. elems @ label.
view
and the results is the attached image.<labels.png>
I want the labels to be at the left of the arc line. Maybe I'm doing something wrong? any ideas?
Bests, Miguel
On Mon, May 18, 2015 at 5:02 PM Miguel Campusano mcampusa@dcc.uchile.cl wrote: I want to add labels first, after that I'm going to publish a video. :)
On Mon, May 18, 2015 at 4:52 PM Tudor Girba tudor@tudorgirba.com wrote: Nice :)
Could you send a video? :)
Doru
On Mon, May 18, 2015 at 8:56 PM, Miguel Campusano mcampusa@dcc.uchile.cl wrote: Here is the screenshot, it is a visualization from the data captured from a laser scan sensor from a robot. The visualization shows an object with the red line and a grid to understand quickly the position of the object within the range of the sensor (This case, the object is approximately in the center between 2 to 4 meters from the robot) . The visualization is dynamic, ie: the red line is automatically updated overtime ;) <laserscan.png>
On Fri, May 15, 2015 at 12:33 PM Alexandre Bergel alexandre.bergel@me.com wrote: Ok, let us know! And send us screenshots :-)
Alexandre
_,.;:~^~:;._,.;:~^~:;._,.;:~^~:;._,.;:~^~:;._,.;: Alexandre Bergel http://www.bergel.eu ^~:;._,.;:~^~:;._,.;:~^~:;._,.;:~^~:;._,.;:~^~:;.
On May 15, 2015, at 10:56 AM, Miguel Campusano mcampusa@dcc.uchile.cl wrote:
Thanks! Both seem to work fine, I'm going to play a bit before deciding for one :)
On Thu, May 14, 2015 at 5:44 PM Peter Uhnák i.uhnak@gmail.com wrote: You can also use bezier lines or SVG
| v e1 e2 l s p1 p2 path svg| v := RTView new. path := 'M -150 150 Q -75 150 -75 75 Q -75 0 0 0'. svg := RTSVGPath new borderColor: Color red; path: path; element. v add: svg. ^ vPeter
On Thu, May 14, 2015 at 10:36 PM, milton mamani akevalion@gmail.com wrote: Try with RTArc:
view := RTView new. shape := RTArc new innerRadius: [ :i | i *15]; externalRadius: [ :i | (i * 15) + 4]; alphaAngle: 45; betaAngle: 135; color: Color black. view addAll: (shape elementsOn: (1 to: 11) ).
view
Cheers, Milton
2015-05-14 16:26 GMT-04:00 Miguel Campusano mcampusa@dcc.uchile.cl: Hi all, I want to draw curved lines in Roassal but I can't find how to. The image below is an example of what I am trying to do.
http://www.aboutbookbinding.com/images/Lines-made-with-Gouges.jpg
Bests, Miguel
Moose-dev mailing list Moose-dev@iam.unibe.ch https://www.iam.unibe.ch/mailman/listinfo/moose-dev
Moose-dev mailing list Moose-dev@iam.unibe.ch https://www.iam.unibe.ch/mailman/listinfo/moose-dev
Moose-dev mailing list Moose-dev@iam.unibe.ch https://www.iam.unibe.ch/mailman/listinfo/moose-dev _______________________________________________ Moose-dev mailing list Moose-dev@iam.unibe.ch https://www.iam.unibe.ch/mailman/listinfo/moose-dev
Moose-dev mailing list Moose-dev@iam.unibe.ch https://www.iam.unibe.ch/mailman/listinfo/moose-dev
Moose-dev mailing list Moose-dev@iam.unibe.ch https://www.iam.unibe.ch/mailman/listinfo/moose-dev
-- www.tudorgirba.com
"Every thing has its own flow" _______________________________________________ Moose-dev mailing list Moose-dev@iam.unibe.ch https://www.iam.unibe.ch/mailman/listinfo/moose-dev
Moose-dev mailing list Moose-dev@iam.unibe.ch https://www.iam.unibe.ch/mailman/listinfo/moose-dev
Moose-dev mailing list Moose-dev@iam.unibe.ch https://www.iam.unibe.ch/mailman/listinfo/moose-dev
Moose-dev mailing list Moose-dev@iam.unibe.ch https://www.iam.unibe.ch/mailman/listinfo/moose-dev
Moose-dev mailing list Moose-dev@iam.unibe.ch https://www.iam.unibe.ch/mailman/listinfo/moose-dev
Moose-dev mailing list Moose-dev@iam.unibe.ch https://www.iam.unibe.ch/mailman/listinfo/moose-dev _______________________________________________ Moose-dev mailing list Moose-dev@iam.unibe.ch https://www.iam.unibe.ch/mailman/listinfo/moose-dev
{kind=link}